Управление биполярным шаговым двигателем без использования драйвера
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.













.jpg)
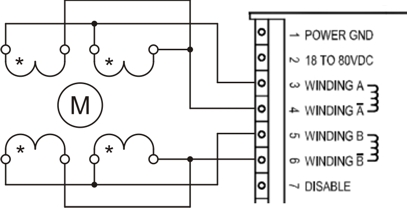
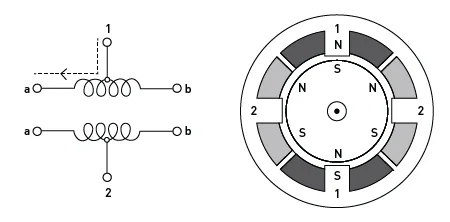
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками 4 вывода , с двумя обмоткми и центральными отводами 6 либо 5 выводов и с четырьмя обмотками 8-ми выводные ШД. Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер т.








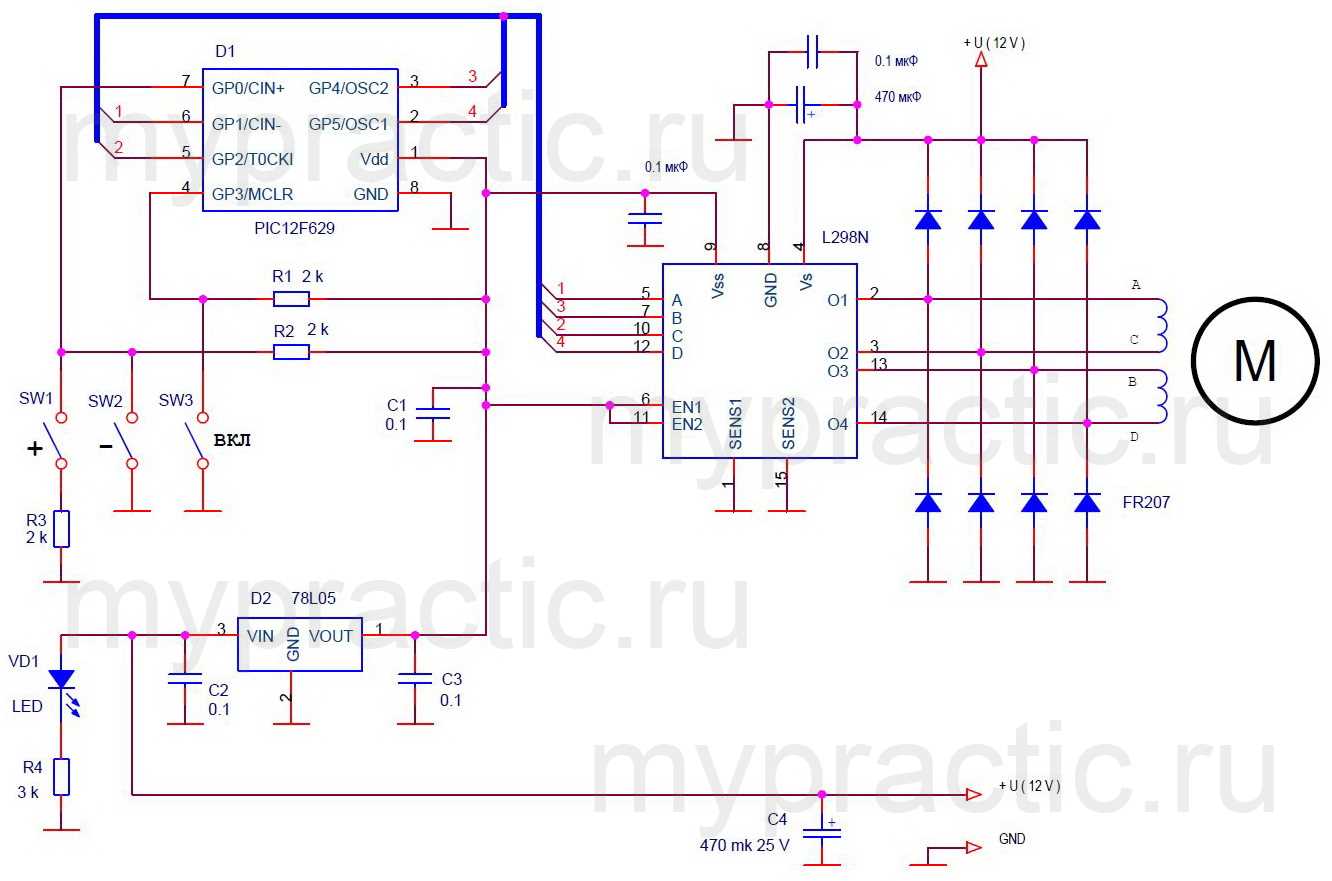
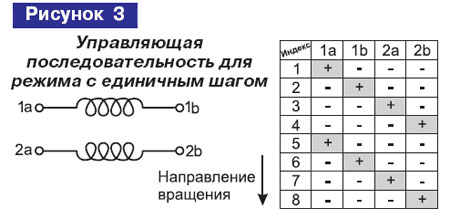
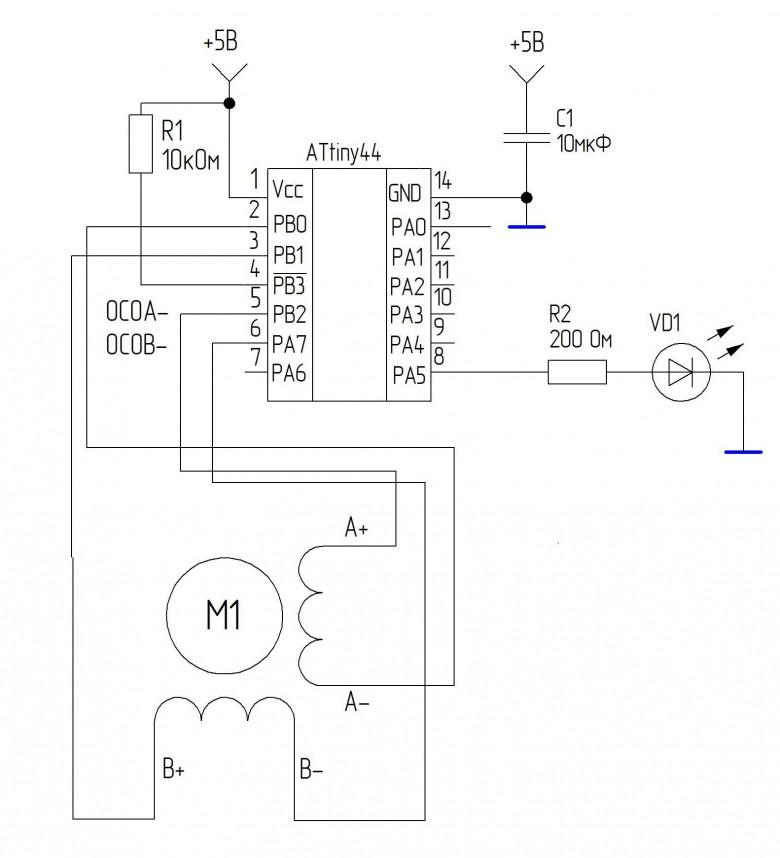

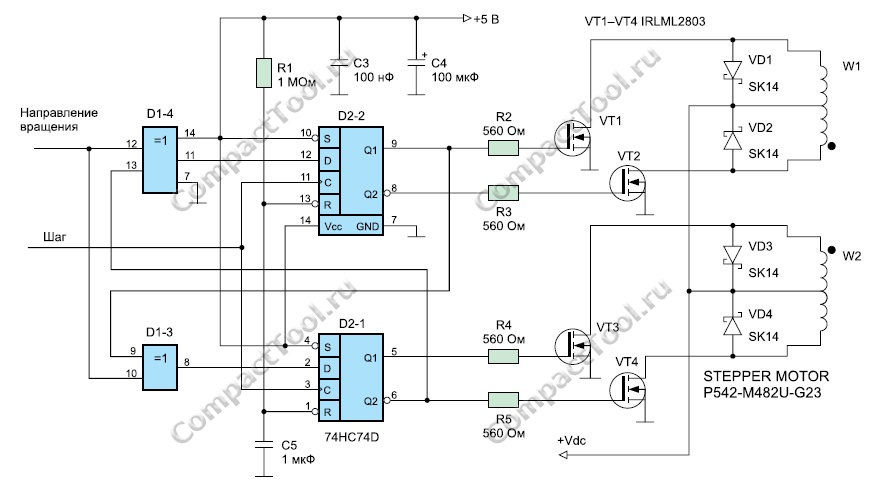
Управление биполярным шаговым двигателем 4 выхода осуществляется последовательным переключением обмоток через двойной H-мост H-мост коммутирует необходимые токи, которые не может выдать микроконтроллер, и позволяет использовать напряжение, отличное от 5В. В зависимости от вида последовательности переключений, существуют несколько режимов работы ШД: полношаговый, полушаговый и микрошаговый. Полушаговый - двойное кол-во шагов от номинального и меньший момент, нежели чем в полношаговом режиме. Микрошаговый в данном контроллере не применяется, так что предлагаем читателям ознакомиться с документацией самостоятельно. Контроллер предназначен для управления одним биполярным шаговым двигателем. Согласно документации LB в схему включены 8 диодов 1N, чтобы защитить микросхему от выбросов обратного напряжения.